




主题教育成效关键看落实。省计量院以计量“三服务”为主要抓手,集中精力入企开展调查研究解难题。近日,省计量院筹建的国家海洋油气资源开发装备产业计量测试中心(以下简称“中心”)帮助上海电气集团股份有限公司解决了全自动充电机器人视觉系统的测量参数溯源难题,保障视觉模块准确识别出电动汽车充电口位置,完成机器人充电过程的无人化操作。
目前电动汽车快充站主要是由固定安装的充电桩为非车载电动汽车动力电池提供直流电源。由于直流充电桩采用三相四线制供电,可以提供足够的功率,输出的电压和电流调整范围大,可以实现快充的要求。但同时,人为操作380V电源存在一定的安全隐患,对线路的保护功能及配电线路管理的要求较高,因此将工业控制自动化引入到充电系统,可以在提高便捷性的同时带来更好的安全性。
上海电气集团股份有限公司研发的“全自动充电机器人视觉系统”将全自动充电机器人作为电动汽车充电桩的智能辅助设备。但该公司成功研制样机后,对测量参数进行溯源时遇到困难,无法有效评价系统的测量能力。
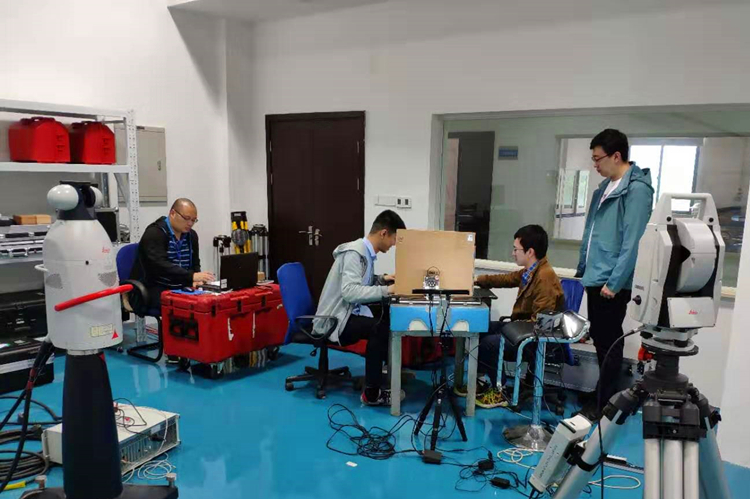
收到该公司委托并了解到具体需求后,中心技术人员同公司研发人员进行了深入讨论,拟基于《室内大长度检测平台检测方法的研究及其检测》的科研项目成果开展对全自动充电机器人视觉系统测评。技术人员将科研项目成果“激光跟踪仪空间坐标测量方法”应用于“全自动充电机器人视觉系统”的测量精度校准工作,包括横向、纵向、深度位置测量,自旋转、水平角、俯仰角姿态校准,使得充电机器人电气接插件的空间姿态测量数据能够溯源,保证了测量结果的准确性和有效性,使产品更具有市场竞争力。